計測工学研究室では、各種工学技術を活用して「ヒトの身体認知・感覚を賢く騙す」システムの提案・開発を行い、それを用いてコグネティクスに関わる研究(認知神経科学×工学の学際的研究)を行っています。また新しい実験システム・試作機開発のために、メカトロニクス技術の基礎研究も(少し)行っています。ここでは、現在行っている/過去に行っていた研究内容についていくつか紹介いたします。
はじめに:コグネティクスの紹介(興味がある方はここをクリック)
コグネティクス(Cognetics)はCognition+ Neuroscience+Roboticsの造語で、2016年3月にスイス連邦工科大学ローザンヌ校(EPFL)のGiuliioRognini博士とOlaf Blanke教授が提案した認知神経科学×工学の学際的研究推進方法です。具体的には、
① 研究課題・仮説の設定
② 実験プロトコルの策定
③ 実験装置の設計・開発・評価
④ 実験装置の運用・調整
⑤ 心理学行動実験・認知神経科学実験
⑥ 脳機能研究・解析
の一連の研究サイクルを互いの価値観のすり合わせを行った認知神経科学者と工学者が分担・連携して行い、それぞれの分野に貢献をもたらすとともに、新しい研究アイデア・技術の創出を目指すものです。工学的な観点から見るとこの考えは、認知神経科学以外の分野にも拡大・展開することができるため、今後さらなる発展が期待されます。
Cogneticsの原著論文より抜粋
"Cognetics joins the cognitive neuroscience of bodily awareness with
robotics to study, control, and enhance perception, cognition, and consciousness.
We highlight robot-controlled bodily perception, conscious states, and
social interactions and sketch how future cognetic interfaces will impact
cognitive neuroscience and human enhancement."
G. Rognini and O. Blanke, "Cognetics: Robotic Interfaces for the Conscious
Mind," Trends in Cognitive Neuroscience, Vol. 20, No. 3, pp. 162–164, 2016. DOI: 10.1016/j.tics.2015.12.002
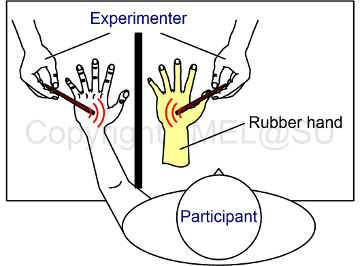
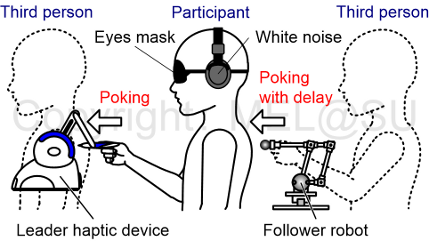
目の前に置かれたゴム手と衝立などで隠された自分の手が絵筆などで同時に刺激されると、自分の身体ではないはずのゴム手を身体の一部であるかのように認識するようになります(図1-1)。この体験はラバーハンド錯覚(RHI:rubber
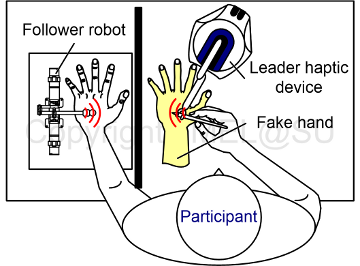
hand illusion)と呼ばれる、ヒトの身体所有感(sense of body ownership)に関する身体錯覚(bodily illusion)の1つです[Botovinick & Cohen 1998]。従来研究では実験者による視触覚刺激提示(visio-tactile stimulation)で身体錯覚を引き起こすのが一般的でしたが、リーダー・フォロワシステム(leader
haptic device & follower robot)と力覚提示装置を用いて研究参加者の身体と人工/仮想身体に受動的に与えられていた触刺激を、研究参加者自らが能動的に与えることができるようにしました(図1-2)。この手法をアクティブセルフタッチ(active
self-touch)と呼んでおり、現在は運動主体感(sense of agency)や触覚フィードバックがヒトの身体所有感や身体的自己意識(bodily
self-consciousness)の発生に及ぼす影響について研究しています(動画1-3)。
 |
|
 |
| 図1-1. 従来手法(visuo-tactile stimulation) |
|
図1-2. アクティブセルフタッチ(active self-touch) |
 |
| 動画1-3. アクティブセルフタッチによるRHI実験 |
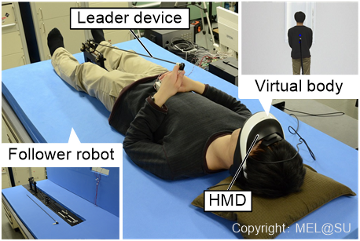
アクティブセルフタッチを応用して、例えば、自分の背中をヘッドマウントディスプレイ(HMD)で提示しながらその映像と同期した触刺激(ストローキング刺激)を自分で与える実験(図1-4)を行うと、幽体離脱体験を健常者で再現するフルボディ錯覚(FBI:full
body illusion)[Leggenhager et al. 2007; Ehrsson 2007]も能動的な状態で引き起すことができます。さらには、図1-5のような状態で実験を行うと誰もいない空間で「何かの存在(FoP:feeling of
a presence)≒幽霊/亡霊(?)」を実験的に体験させることもできます[Blanke et al. 2014]。
 |
|
 |
| 図1-4. アクティブセルフタッチによるFBI実験 |
|
図1-5. アクティブセルフタッチによるPH実験 |
他にも、VR技術(3Dグラフィックスによる仮想身体や仮想物体など)なども導入して、ヒトの身体感覚・身体認知をを「賢くだます」ためのシステムを開発し、認知科学・認知神経科学研究に貢献することを目指しています。
実環境での心理学行動実験(behavior experiment)の後に、脳波(EEG:electroencephalogram)や機能的磁気共鳴画像(fMRI:functional
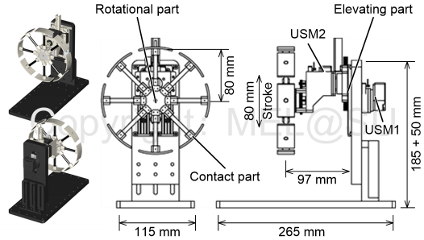
magnetic resonance imaging)を用いた脳機能研究が行われることがあります。脳機能計測中にはよく管理された触刺激や運動提示が要求されることがあり、ロボットやハプティックデバイス(触/力覚提示装置)が役立つものと考えられます。しかしながら、脳計測環境には様々な制約があり、例えば研究用MR画像の撮像には1.5~7Tという強磁場(例:ピップエレキバンZ=0.19T)と高出力のRF照射を用いるため(動画2-1)、従来のDCモータや力センサなどをそのままでMRI環境に持ち込むことはできません。そこで、各種脳機能計測に対応したメカトロニクス技術について研究し、それを用いて脳機能究用のロボットやハプティックデバイスを開発することを行っています(図2-2)。
 |
|
 |
| 動画2-1. MRI環境の磁場の強さ ※望遠で撮影しています |
|
図2-2. 例:fMRI対応触覚提示デバイス |
リハビリテーションは、病気やケガ、加齢などにより、生活をする能力が低下した人の生活の質(QOL:quolity of life)を向上するのに必要な行為です。リハビリテーションと言うと、一般的には理学療法士(PT:physical
therapist)が行う運動療法と物理療法による運動機能の回復、作業療法士(OT:occupational therapist)による日常生活における動作訓練、言語聴覚士(ST:Speech-language-hearing
therapist)による話す・聞く・摂食などの障害に対するケアが一般的ですが、近年ではヒトの脳のメカニズムや認知機能にも目を向けた治療が研究・実践され始めています。この脳科学や認知神経科学の知見を利用した治療はニューロリハビリテーション(neurorehabilitation)と呼ばれています。現在、理学療法学、保健学、言語療法学などの分野の研究者と共同で、ヒトの身体認知特性(身体所有感や内受容感覚)とロボティクス・ハプティクス・VR/AR技術を融合した新しいニューロリハビリテーションシステムの開発(図3-1&動画3-2)を目指して学際的な研究を進めています。例えば,バーチャルハンドを用いた上肢リハビリテーションシステムやロボティクス・メカトロニクス技術を用いた新しい嚥下評価方法の開発などの研究を行っています。
 |
|
 |
| 図3-1. 心拍駆動型身体イメージ変容システム |
|
動画3-2. VR/ARを用いたリハビリテーションシステムの試作 |
計測工学研究室では、主に認知神経科学や脳科学,理学療法学の発展に貢献するための研究を推進していますが、工学技術の研究についても(少しは)行っています。具体的には、流体、磁気、電気などの力を使ったアクチュエータや計測・制御技術の研究を行っています。
 |
| 動画4-1. 矩形容器の水平加振による液中微小粒子のマニピュレーション |